芯出し作業中、許容値に収まり、モーターの脚のボルトを締めた後、念のためもう一度オフセットと偏角を確認してみたら、さっきと数値が違ったという経験ありませんか?もしかしたらモーターの基礎や脚部にがたつきがあるのかもしれません。
イージーレーザー®では、そのがたつきをチェックできる機能が備わっています。本日は猫脚=ソフトフットチェック機能について、モーターとポンプの軸芯出しを例に、その方法をご説明します。
ソフトフット機能の使い方
ソフトフットプログラムを使用することで、機械がすべての脚に対して均等に置かれているか、そうではない場合、どの脚にどの程度のシムを入れればよいかを確認することができます。
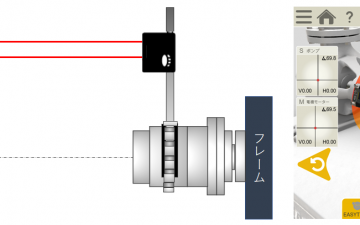
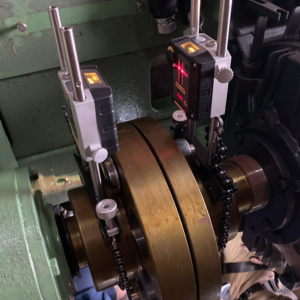
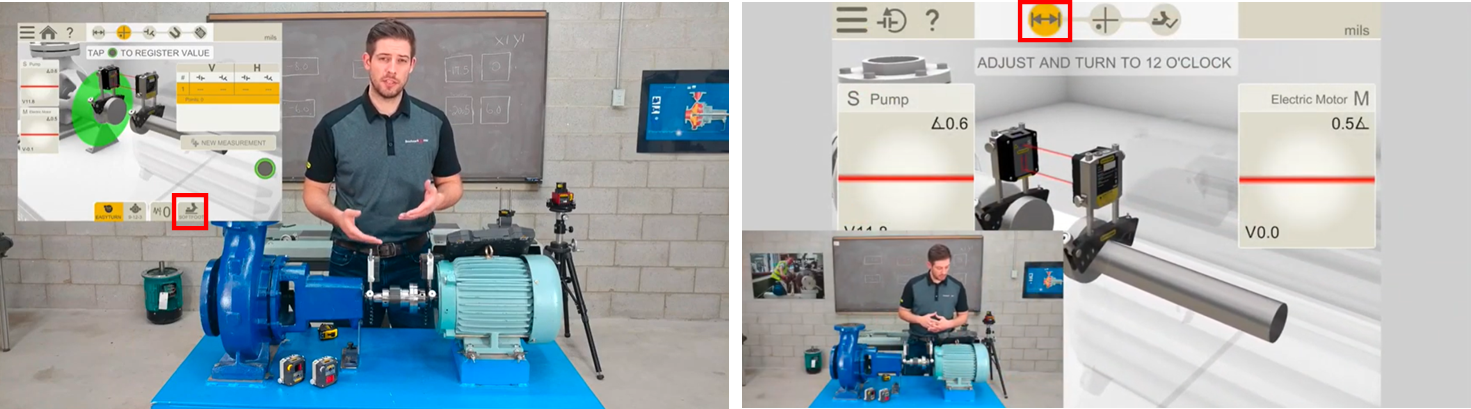
①測定ユニットをシャフト(軸)に取り付ける
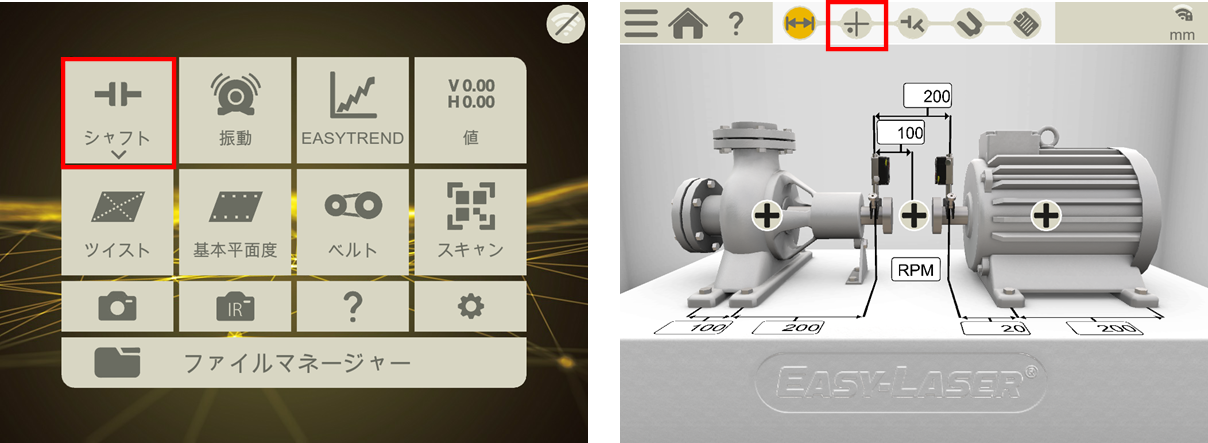
②ディスプレイを起動し、シャフト→水平プログラムを選択する
③ディスプレイに表示された距離を測り、入力する
④測定アイコンをタップする
⑤測定ビュー画面で下段タブの【ソフトフットアイコン】をタップする
⑥受光器を12時の位置に配置する
⑦測定アイコンをタップする
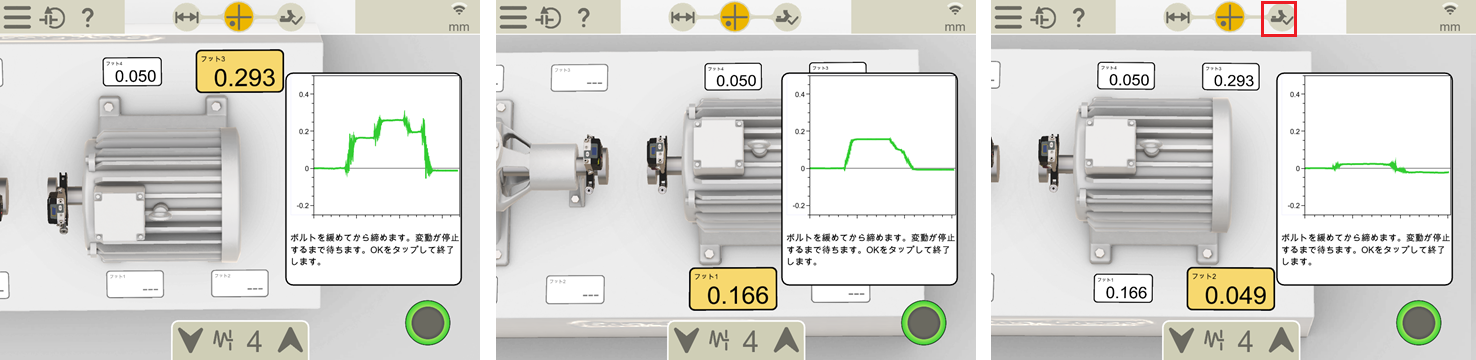
⑧いずれかの脚の値のボックスをタップする
⑨選択した脚部のボルトを緩める。グラフをチェックして、値が安定したことを確認する
⑩選択した脚部のボルトを締める
⑪緑ボタンをタップして、値を登録する
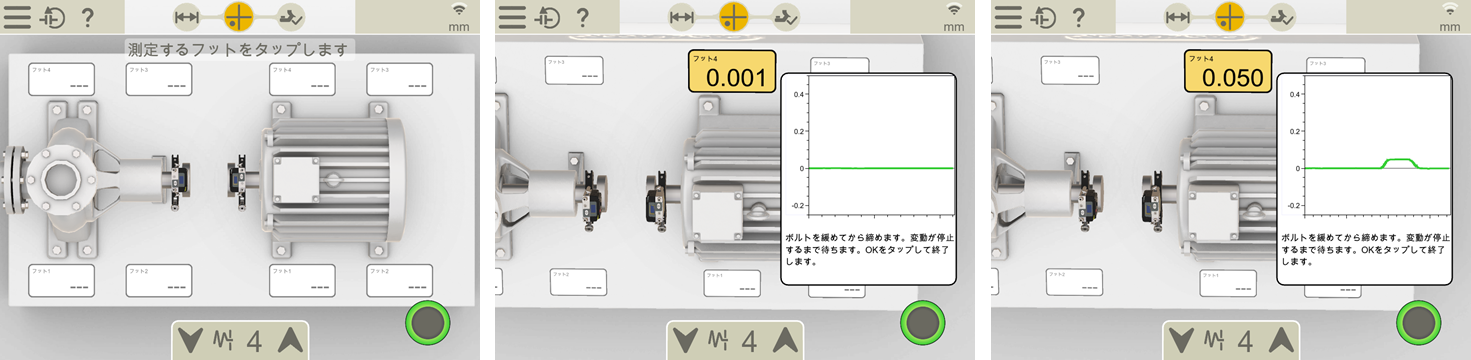
⑫モーターの脚4か所すべて同様の作業をし、値を登録する
⑬上段のチェックアイコンをタップする
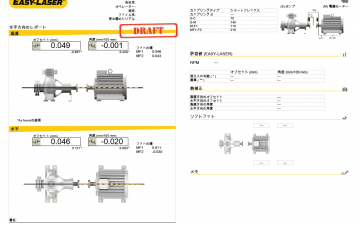
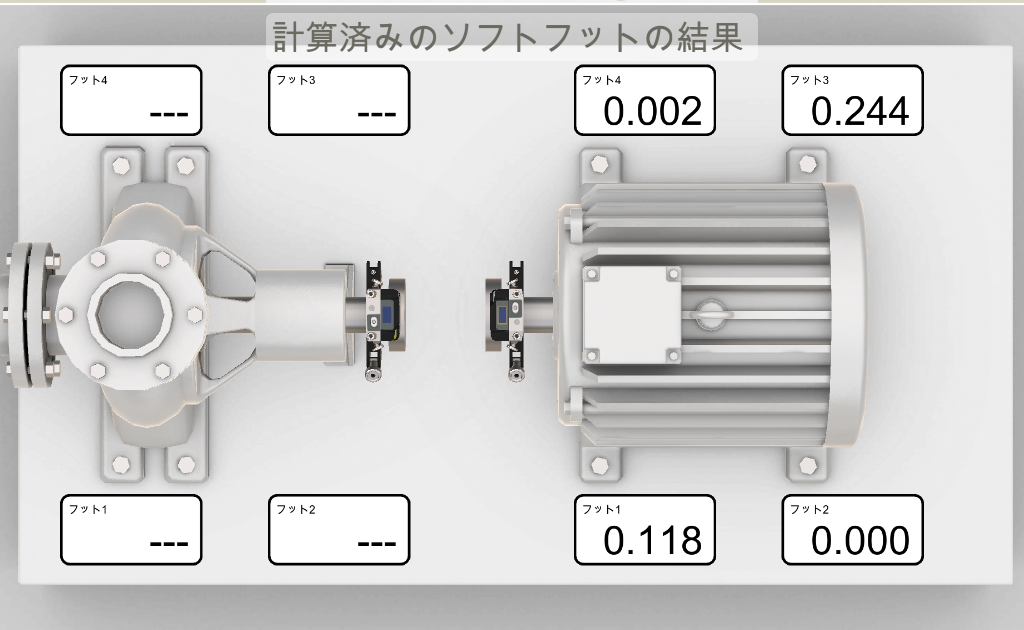
⑭ソフトフットの結果が表示される
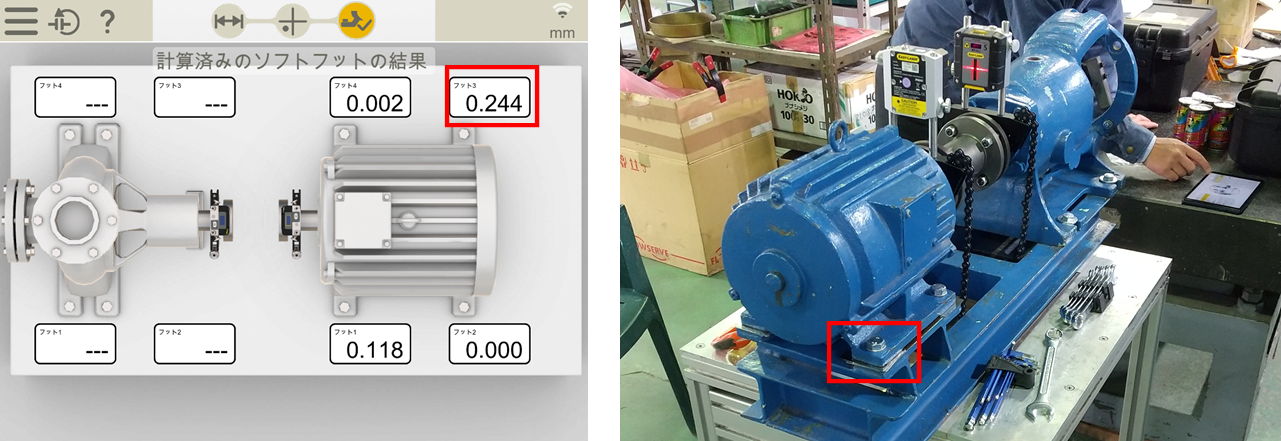
今回の例では、赤枠の脚に0.2mm程度のシムを挿入します。
おわりに
以下の状態では猫脚(ソフトフット)になりやすいとされています。
・マシンの基礎部分がねじれている。
・マシンの脚にねじれ、または損傷がある。
・マシンの脚の下に、不適切な量のシムがある。
・マシンの脚の下に、ごみやその他の不要な物質がある。
適切にシムを入れる以外にもポイントになることがありますので、事前チェックも重要です。
※本サイトは鉄原実業株式会社![]() が運営しております。
が運営しております。
文/いしだ