こんな課題・お悩みをお持ちの方向けの記事です。
軸芯出し作業において、測定、調整を実施し、許容値に収まったからモーター脚のボルトを締め、最終確認のため測定結果を見てみたら「あれ、結果がさっきと違う……」。そのような経験をされた方、多いのではないでしょうか。
その場合、ソフトフット(猫脚)の影響を受けているのかもしれません。
正確な芯出しを短時間で行うためにも、レーザーアライメントシステムのソフトフットプラグラムを使用し、「芯出し前の事前チェック」を行ってみませんか?
イージーレーザー社が推奨する軸芯出し5つのステップ
イージーレーザー®シャフトアライメントを開発、販売しているイージーレーザー社は芯出しに関するさまざまなコンテンツを配信しています。軸芯出しのポイントを解説しているYouTubeの最後に紹介されているまとめを見てみましょう。
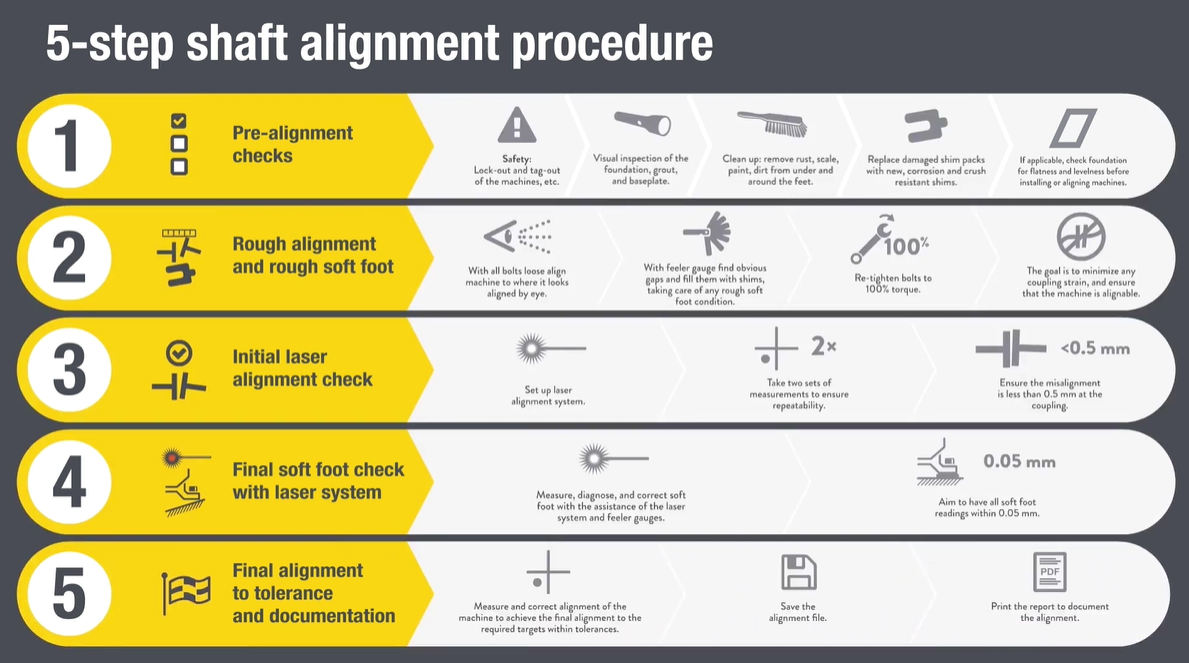
Step1は事前チェックとなっています。それほど、芯出し作業において、事前のチェックは重要です。具体的には安全性を確保し、目視で基礎などの状態を確認、モーターの脚の部分のごみや付着物を取り除き、汚れたシムは新しいものに交換しておきます。機械を置く土台の平面度(レベル)の確認も行うことが望ましいです。
ソフトフット(猫脚)とは?
STEP2とSTEP4ではソフトフットについてふれられています。ソフトフットとは日本では猫脚と呼ばれており、ボルトを締めていない状態で機械(ポンプやモーター)を土台に置いた時、がたがたしている状態を指します。喫茶店やファストフードの机やイスがガタガタすることがありますが、あのイメージです。この状態ではボルトで土台に締結しても最終的には芯が出ない状態となってしまいます。
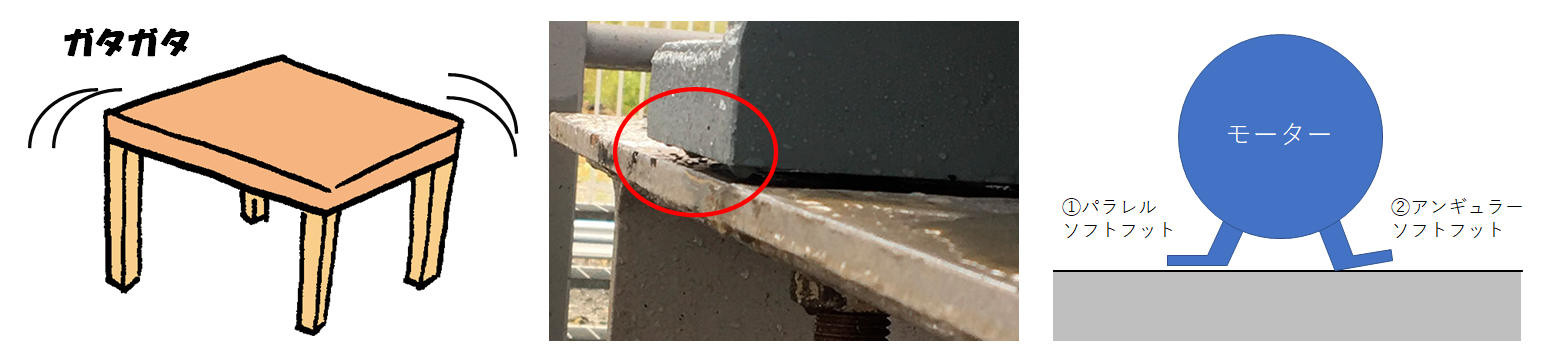
「何度やっても芯が出ない」「数値の再現性がない」「ボルトを締めた後シムが動いてしまう」このような時はソフトフットである可能性が高いです。
ソフトフットの4タイプ
ソフトフットには4つのタイプがあります。共通点としては1つまたは複数の脚が機械ベースにしっかりと固定されていないことが挙げられます。さまざまな理由がありますので、それぞれの特徴を見てみましょう。
1. パラレル(平行)ソフトフット
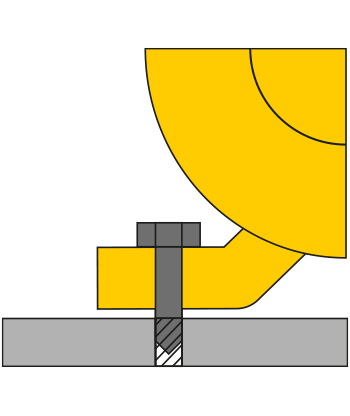
パラレルソフトフット(ロッキングソフトフットとも呼ばれる)は、4つの脚すべてが同じ平面上にない状態を意味します。前後に揺れるぐらついたレストランのテーブルを思い浮かべてみてください。この場合、レーザーアライメントシステムのソフトウェアは、対角のソフトフットの高い値(> 0.05 mm)を示します。フィーラーゲージを使用すると、シム調整する必要がある1つもしくは複数の脚とシム量を決定できます。
パラレルソフトフットになる理由として下記3点が考えられます。
• 脚が短すぎる。
• ベースプレートまたは取り付けパッドが同一平面上にない。
• 1つまたは複数の脚の下にシムが足りない。
パラレルソフトフットを修正するには、ロッキング効果を取り除くのに十分なシムを追加します(シムは4枚以下、できるだけ少ない枚数にしましょう)。
2. ベントフット/外側に角度の付いたソフトフット
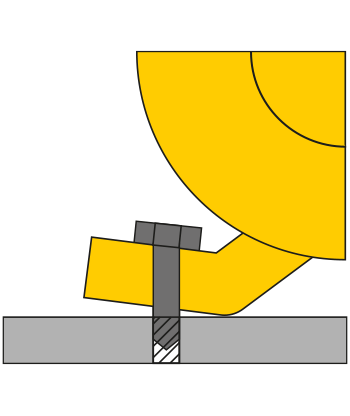
ベースに対して脚の裏に角度がついてしまっているときに発生する一般的なタイプのソフトフットです。この場合、レーザーアライメントシステムは3つもしくは4つの脚でソフトフットの値が高くなります。値が最も高い脚は、脚のコーナーから別のコーナーへテーパーエアギャップがある状態です。
この状態には、次のようないくつかの理由が考えられます。
•機械の落下や、適当な設置。
•ベースプレートが曲がっているか、機械加工が不十分。
•垂直方向に大きな角度ずれがある。
•脚が溶接されている。
•ベースの沈下が発生している。
この問題を修正する最良の方法は、脚、ベース、またはその両方を再加工することです。これが不可能な場合は、階段状にシムを入れます。(あくまで選択肢の一つであり、できれば回避するようにしてください)。
3. スクイーズフット
スクイーズフットは、スプリングフットとも呼ばれます。スクイーズフットの場合、フィーラーゲージでは脚の下の隙間を計測することができません。この状態は脚とベースの間のスペースに、ソフトフットを修正するため以前から使用されているあまりにも多くのシムが詰まっていることから起こります。脚の下に汚れやさびなどが堆積しているケースもあります。
スクイーズソフトフットになる理由は次の通りです。
• 脚とベースの間に汚れ、グリース、ペイント、さびが堆積している。
• 多量のシムを使用している(脚一つあたり4枚を超えるシムを使用しない)。
• シムが変形している。
• バリのあるシムを使用している。
この問題を解消するには、脚の周囲を徹底的に掃除し、古いシムを新しく強度のあるものと交換します。
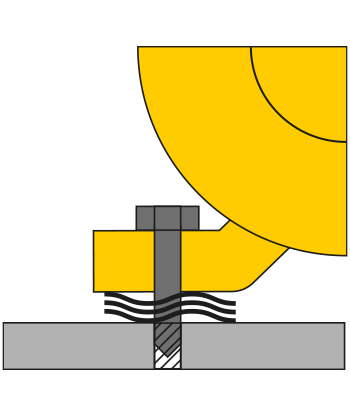
4. 誘発されたソフトフット
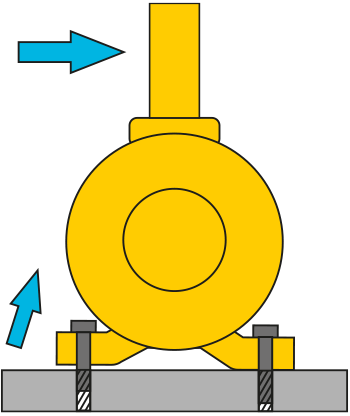
誘発されたソフトフットは、機械のフレームに影響を与える応力によって引き起こされるため、特定が難しい場合があります。通常、機械の同じ側または同じ端にある複数の脚でソフトフットが起こります。レーザーアライメントシステムを使うことで確認することができます。フィーラーゲージでは、平行なギャップであればソフトフットをチェックできます。
誘発されたソフトフットの想定される原因は下記の通りです。
•カップリングまたはパイプ応力。
•機械が張り出している。
•プーリーとギアのベルトまたはチェーンの負荷。
•フレックスコンジットに過度な剛性がある。
•ブレース構造が機械に取り付けられている。
•ジャッキボルトがきつく締められた状態である。
誘発されたソフトフットを修正するには、問題の原因となる応力を取り除く必要があります。このような応力はシャフトのアライメント調整中、どのタイミングでも発生する可能性があるため、複数のソフトフットチェックが必要になる場合があります。
ソフトフットプログラムの使い方
イージーレーザー®にはソフトフットを確認するプログラムが搭載されています。
このプログラムを使用することで、機械がすべての脚に対して均等に置かれているか、そうではない場合、どの脚にどの程度のシムを入れればよいかを確認することができます。
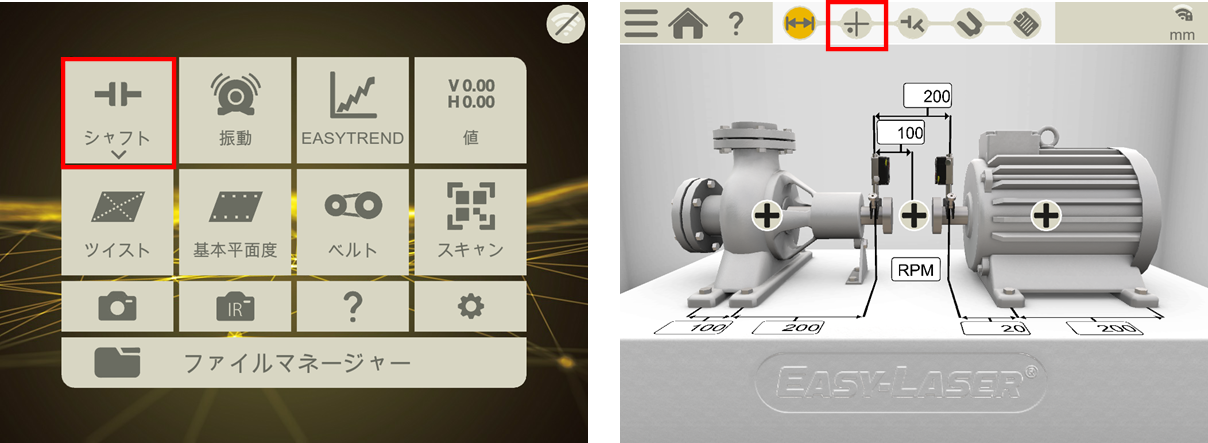
①測定ユニットをシャフト(軸)に取り付ける

②ディスプレイを起動し、シャフト→水平プログラムを選択する
③ディスプレイに表示された距離を測り、入力する
④測定アイコンをタップする
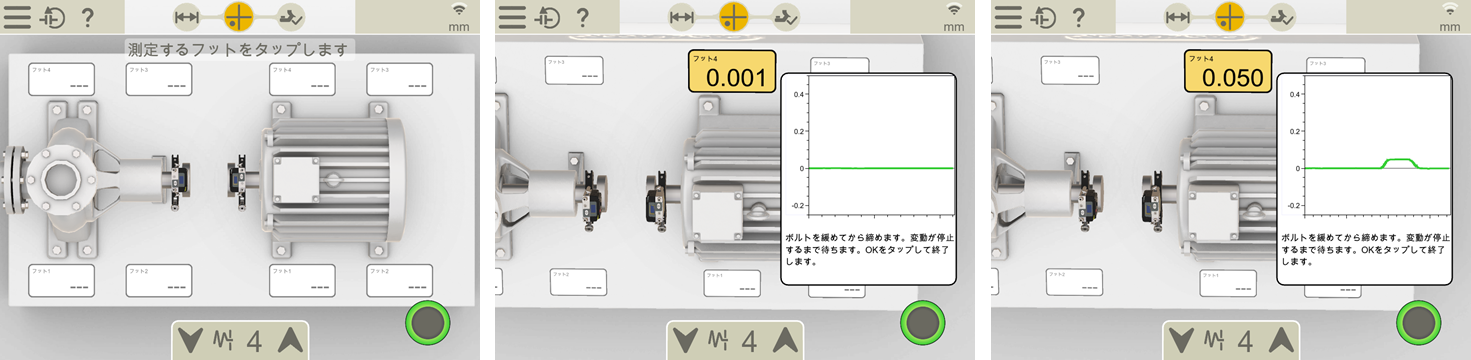
⑤測定ビュー画面で下段タブの【ソフトフットアイコン】をタップする
⑥受光器を12時の位置に配置する
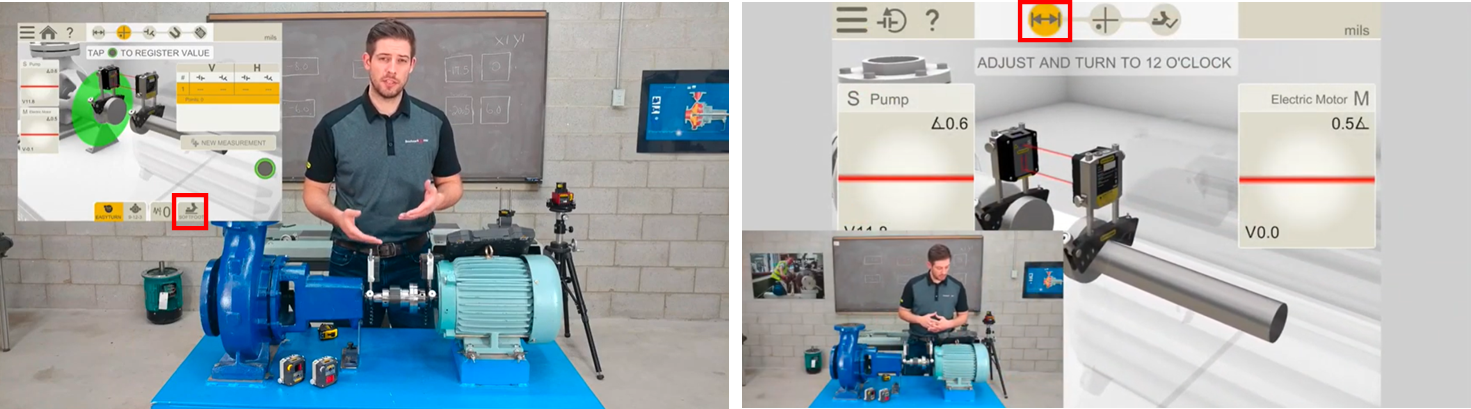
⑦測定アイコンをタップする
⑧いずれかの脚の値のボックスをタップする
⑨選択した脚部のボルトを緩める。グラフをチェックして、値が安定したことを確認する
⑩選択した脚部のボルトを締める
⑪緑ボタンをタップして、値を登録する
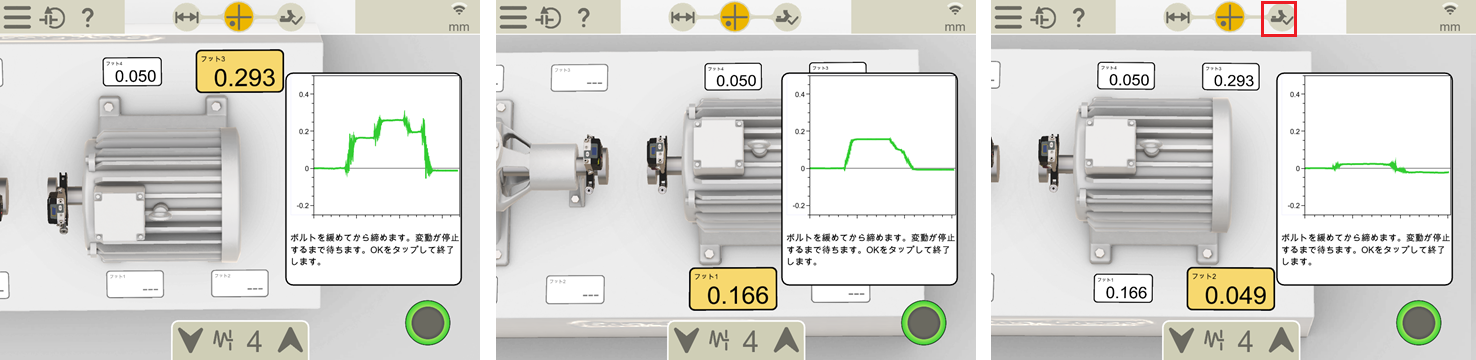
⑫モーターの脚4か所すべて同様の作業をし、値を登録する
⑬上段のチェックアイコンをタップする
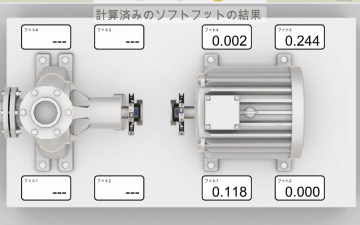
⑭ソフトフットの結果が表示される
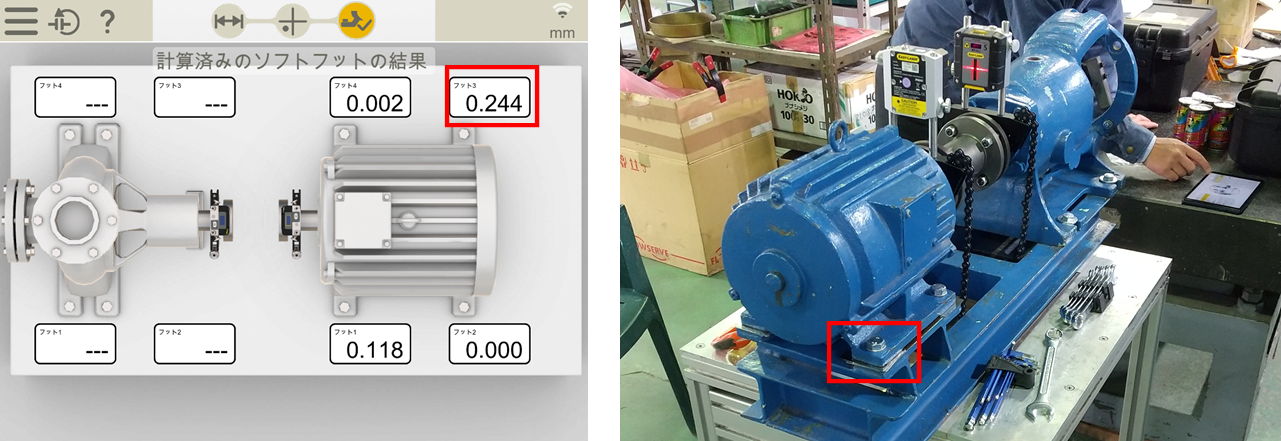
今回の例では、赤枠の脚に0.2mm程度のシムを挿入します。
おわりに
YouTubeにレーザー式芯出しにまつわる解説動画を複数アップしております。
 |
 |
※本サイトは鉄原実業株式会社![]() が運営しております。
が運営しております。
文/いしだ