ブログ
6.92020
往復動圧縮機の状態監視にロッドポジションセンサの設置を推奨するその理由。どのような異常が検知できるか知っていますか?
往復動圧縮機のオンライン監視のために設置する各種センサですが、それぞれの用途、解析によってわかることが何かご存知でしょうか。本日は、PROGNOST社が提供しているYouTubeチャンネルから、「ロッドポジションセンサ」についての解説動画を日本語解説付きでお届けします。
主に①ロッドポジションセンサの仕組み、②3つの解析手法、③往復動圧縮機のオンライン状態監視にロッドポジションセンサが有効な理由の3点について解説しています。
ロッドポジションセンサの仕組み
ロッドポジションセンサとは、ピストンロッドの上下どちらかに(場合によってはオプションとして左右に)設置することで、ピストンロッドがどのように変位したか=ピストンロッドの振れをμm単位で測定できるセンサです。どのような仕組みで検知しているかというと、センサ先端のプローブ(動画で紹介しているセンサでは黒い部分)から発生した磁界(黒板の赤線)の変化をまずは電圧に変換します。この電圧をモニタリングシステムに取り込むことで、どの程度ロッドが変位したのかをモニタリングすることができます。
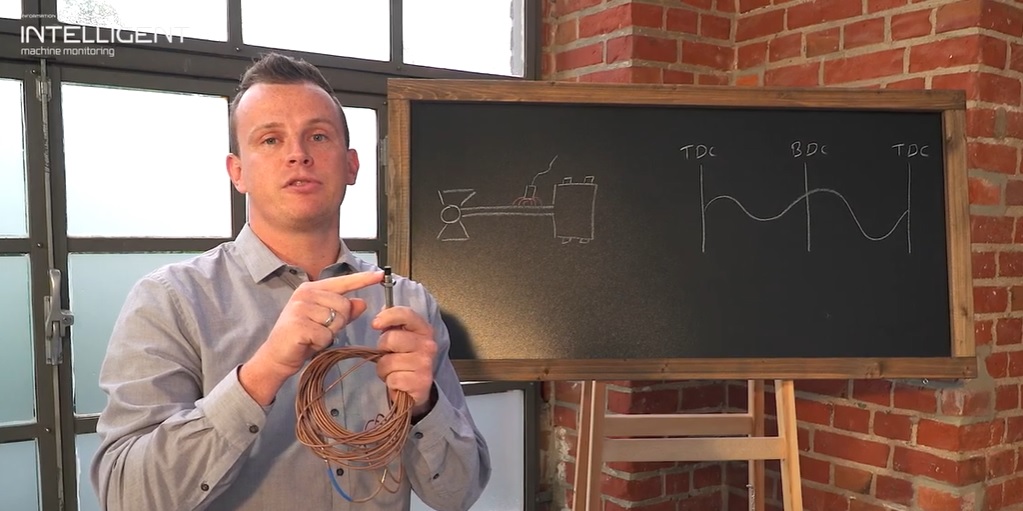
ロッドポジションセンサのケーブル長は10mなど任意で選択可能です。ただし、そのケーブル長を短く加工することは原則できません。ケーブルの抵抗が変わり、正確な計測結果を得ることができなくなってしまうためです。
ロッドポジションセンサ設置時のポイント
ロッドポジションセンサの最大計測距離に応じて、ロッドから適切な距離を保ち、設置する必要があります。ロッドからプローブまでの距離が遠くなりすぎると、正確な計測ができなくなってしまいますし、ロッドに近すぎても、ロッドとセンサが接触するリスクがあります。
ロッドポジションセンサの仕様によって、2mmまで計測可、4mmまで計測可など、計測可能な距離が異なります。ロッドの上下の変化を捉えることが目的ですので、例えば、2mmまで計測可のセンサを使用する場合は、ロッドからプローブまでの距離を1mmに設定します。
センサが取得したオンライン信号の波形の見方
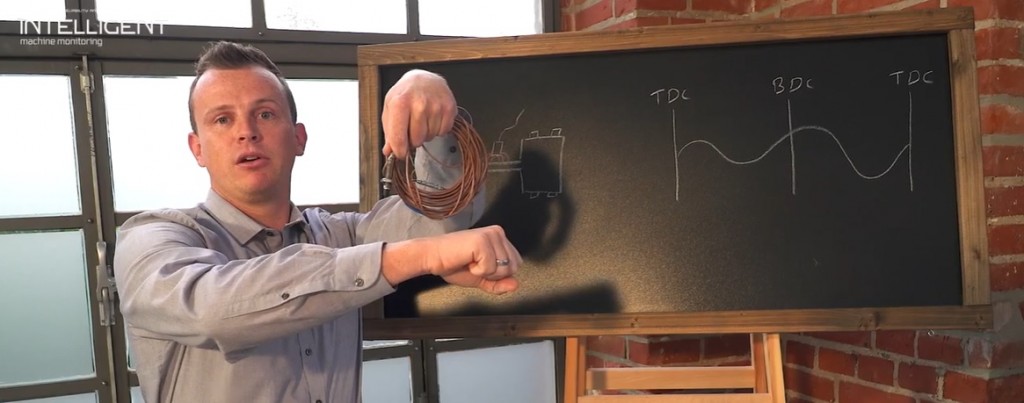
続いて、黒板に書いてある右側の図について見ていきましょう。上死点(TDC)→下死点(BDC)→上死点(TDC)まで、クランクシャフト1回転の間にロッドポジションセンサが取得したオンライン信号を模式図にしました(写真では、男性の腕をピストンロッド、拳をピストンヘッドに例えています)。
ロッドポジションセンサから取得した信号解析でわかること
ここからは、「②往復動圧縮機のオンライン状態監視にロッドポジションセンサが有効な理由」について、センサが取得した信号をどのように解析して、そこからどのような示唆を得ることができるのかという視点で解説します。
解析手法は主に2つあります。
A) アベレージ(平均値)
クランクシャフト1回転中のオンライン信号の平均値を算出する、汎用的な解析手法です。一定期間、このトレンド(傾向)を管理することで、その期間中、ピストンがどの程度上下に動いたのかを把握することができます。ライダーリングの摩耗傾向をつかむ際、役立つ解析手法です。
B) ロッドポジションのピークトゥピーク値
アベレージを解析する方法は、ライダーリング摩耗の傾向をつかむためには非常に有用である一方で、突発的な事象を検知するのには向いてないというデメリットがあります。
例えば、ドレンや異物が一時的に混入し、すぐに吐出弁から排出されてしまうケースを考えてみます。混入時、ピストンロッドは一時的に大きく振れますが、クランクシャフト1回転中の平均にならしてしまうと、そこまで大きな値の変化にはなりません。しかし、損傷発生時の主原因解析においては、このような突発的に発生した事象についても、しっかりと把握する必要がありますよね。
このようなケースを捉えるために用いられるのが、ロッドポジションのピークトゥピーク値の解析です。ピークトゥピーク値の解析では、クランクシャフト1回転のオンライン信号の最大値と最小値の差を用います。
この動画を配信しているPROGNOST社では、往復動圧縮機のオンライン状態監視・診断用システムを開発、販売しています。そのシステムでも、A) アベレージ、B) ロッドポジションのピークトゥピーク値解析を行っていますが、PROGNOSTシステムでは、さらに一歩進んだ解析手法を取り入れ、機器保護(システムによる機器の緊急停止)の判断に役立てています。それがC) ロッドポジションのピークトゥピーク値の8セグメント解析です。
ロッドポジションのピークトゥピーク値の8セグメント解析でわかること
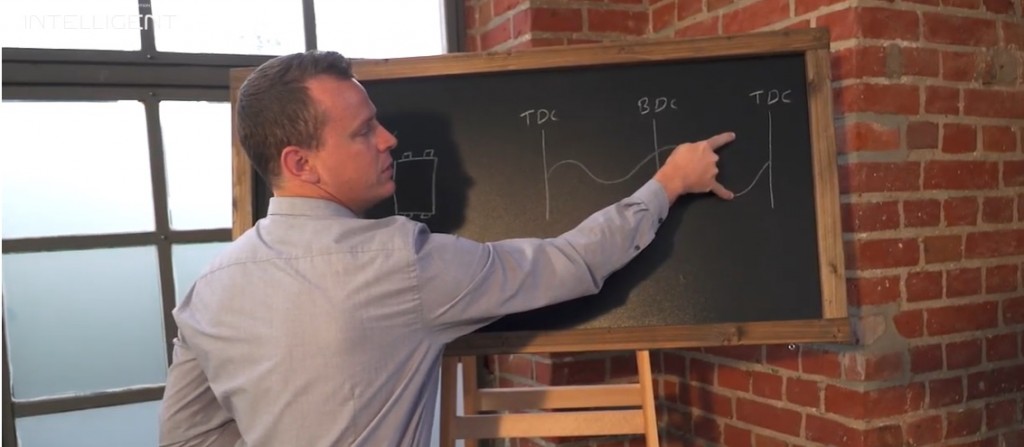
PROGNOSTシステムの特徴的な解析手法に、セグメント解析があります。ピストンロッド変位の解析においては、クランクシャフト1回転中のオンライン信号を45度ずつ、8つのセグメントに分割した後、それぞれのセグメント内のピークトゥピーク値(最大値と最小値の差)をシステムが自動で算出します。

セグメント1はクランク角度0-45度、セグメント2は45-90度……、セグメント8は315-360度となります。写真では、セグメント3を示しています。
このようにセグメントごとに分割した後に、どのセグメント(=クランクシャフトが何度回転した時)のピークトゥピーク値に大きな変化があったのかを解析することで、シリンダ内をピストンヘッドがどのように通過している時(例:トップ側の圧縮行程、ボトム側の再膨張行程、ロッド荷重の反転時など)に起こった事象なのかを知ることができます。
例を考えてみましょう。ボトム側の吸入弁からシリンダ内に異物が混入した場合、異物の上をピストンヘッドがスライドすることになり、ピストンロッドの位置が一瞬ですが上がります。このロッドの振れはピークトゥピーク値となって、特定のセグメントに表れます。ロッドポジション変位が大きくなったセグメント(ピストンヘッド位置)と、その他駆動部の振動、例えば、クロスヘッド部の振動や、シリンダ振動を総合的に解析することで、異物の混入という主原因を特定することができます。
ドレンや金属片といった異物の混入のほか、接続部の緩みなどの不良の早期検知に一役買うのが、ロッドポジションのピークトゥピーク値のセグメント解析です。検知した異常が機器の安全運転に影響を及ぼす場合は、システムによる緊急停止を実行するよう設定することも可能です。
ライダーリング摩耗のモニタリング
ライダーリングで一番怖いのは、摩耗に気づかず運転を続け、ピストンがシリンダライナーと接触してしまうことですよね。それを回避するために、有効なのがライダーリング摩耗のモニタリングです。オンライン状態監視システムを最大限に活用すれば、ロッドからセンサまでの距離変化に加え、センサ~ライダーリング間寸法、ピストン径、ストロークといった情報から、ライダーリングの摩耗量を高精度で算出することができます。
例えば、ライダーリングの径方向厚みに対して、最大1000μmの摩耗代がある場合、600-700μmの摩耗が確認された時点で、警告などのメッセージを発信する自動診断機能があるオンライン状態監視システムを採用することで、計画的にライダーリングの手配や交換ができるといったメリットがあります。
ちなみに、PROGNOSTシステムはモジュール式を採用しているため、ライダーリング摩耗のモニタリング機能をシステムに搭載するか否か、お客様にて選択いただくことができます。
おわりに
いかがでしたか。今回のコラムは、PROGNOST社が配信しているYouTubeチャネルの内容がベースになっています。
文/いしだ



